马上注册,结交更多好友,享用更多功能,让你轻松玩转社区。
您需要 登录 才可以下载或查看,没有账号?注册
×
今天突然发现一博客专门写了关于约束的文章,比较详细也比较全面,希望自己可以通读深读吧。 在给FPGA做逻辑综合和布局布线时,需要在工具中设定时序的约束。 通常,在FPGA设计工具中都FPGA中包含有4种路径:从输入端口到寄存器,从寄存器到寄存器,从寄存器到输出,从输入到输出的纯组合逻辑。 通常,需要对这几种路径分别进行约束,以便使设计工具能够得到最优化的结果。下面对这几种路径分别进行讨论。
1,从输入端口到寄存器:
这种路径的约束是为了让FPGA设计工具能够尽可能的优化从输入端口到第一级寄存器之间的路径延迟,使其能够保证系统时钟可靠的采到从外部芯片到FPGA的信号。约束名称:input delay. 约束条件的影响主要有4个因素:外部芯片的Tco,电路板上信号延迟Tpd,FPGA的Tsu, 时钟延迟Tclk. Tco的参数通常需要查外部芯片的数据手册。 计算公式:input delay = Tco+Tpd+Tsu-Tclk. FPGA的Tsu也需要查FPGA芯片的手册。 FPGA速度等级不同,这个参数也不同。 Tpd和Tclk需要根据电路板实际的参数来计算。通常,每10cm的线长可以按照1ns来计算. 例如:系统时钟100MHz, 电路板上最大延迟2ns, 时钟最大延迟 1.7ns, Tco 3ns, FPGA的Tsu为0.2ns. 那么输入延迟的值: max Input delay = 2+3+0.2-1.7=3.5ns. 这个参数的含义是指 让FPGA的设计工具把FPGA的输入端口到第一级寄存器之间的路径延迟(包括门延迟和线延迟)控制在 10ns-3.5ns=6.5ns 以内。
2,寄存器到寄存器:
这种路径的约束是为了让FPGA设计工具能够优化FPGA内寄存器到寄存器之间的路径,使其延迟时间必须小于时钟周期,这样才能确保信号被可靠的传递。 由于这种路径只存在于FPGA内部,通常通过设定时钟频率的方式就可以对其进行约束。对于更深入的优化方法,还可以采用对寄存器的输入和寄存器的输出加入适当的约束,来使逻辑综合器和布线器能够对某条路径进行特别的优化。 还可以通过设定最大扇出数来迫使工具对其进行逻辑复制,减少扇出数量,提高性能。
3,寄存器到输出:
这种路径的约束是为了让FPGA设计工具能够优化FPGA内部从最后一级寄存器到输出端口的路径,确保其输出的信号能够被下一级芯片正确的采到。 约束的名称: output delay, 约束条件的影响主要有3个因素:外部芯片的Tsu,电路板上信号延迟Tpd,时钟延迟Tclk. Tsu的参数通常需要查外部芯片的数据手册。 计算公式:output delay = Tsu+Tpd-Tclk. 例如:系统时钟100MHz, 电路板上最大延迟2ns, 时钟最大延迟 1.7ns, Tsu 1ns, 输出延迟的值: max output delay = 1+2-1.7=1.3ns . 这个参数的含义是指 让FPGA的设计工具把最后一级寄存器到输出端口之间的路径延迟(包括门延迟和线延迟)控制在 10ns-1.3ns=8.7ns 以内。
4,从输入端口到输出端口:
这种路径是指组合逻辑的延迟,指信号从输入到输出没有经过任何寄存器。给这种路径加约束条件,需要虚拟一个时钟,然后通过约束来指定哪些路径是要受该虚拟时钟的约束。 在Synplifypro和Precision中都有相应的约束来处理这种路径。
前面的帖子里讲述了关于输入输出延迟的一些参数的含义和计算方法。如果要把这些参数和altera,xilinx的软件结合起来,也不是一件容易的事情。以前altera和xilinx的约束条件设定非常复杂,各自都有一套。似乎大家也不太看重约束条件的设定,大多时候都是无论如何先上板,然后通过signaltap和Chipscope来调。当FPGA规模大了之后,布线一次都需要很长时间,这种方法的弊端就越来越严重。 实际上可以借鉴ASIC的设计方法:加比较完善的约束条件,然后通过RTL仿真,时序分析,后仿真来解决问题,尽量避免在FPGA电路板上来调试。 altera最先意识到这一点,它采用了Synopsys的SDC格式。SDC的格式也得到了逻辑综合器的支持。而且设定方法比较容易掌握。 这个帖子会详细讨论一下这种格式的约束设定方法。 时钟的设定方法: 时钟要分成两种,一种是从端口上直接输入的时钟,另一种是在FPGA内部产生的时钟。内部产生的时钟又要分成两种,从锁相环出来的(包括altera的PLL和Xilinx的DLL)和从逻辑单元出来的,例如一般的计数器分频就是这种情况。 从锁相环出来的时钟可以通过端口直接加,因为一般的综合工具和布线工具都能够自动的把端口的时钟约束传递到锁相环,并且根据锁相环的倍频关系自动施加到下一级。 而从逻辑单元出来的就需要单独对其进行约束。
在SDC格式中,创建时钟的命令 create_clock, 后面要带3个参数:name ,period, waveform. name的含义是指创建这个时钟约束的名字,而不是时钟本身的名字。 要把这个约束和时钟信号关联起来,还需要在后面加些东西。 period的单位缺省是ns. waveform是用来指定占空比。 除了这三个参数以外,常常还要加 get_ports的命令,来指定时钟的输入端口。 下面的例子是一个较为完整的设定时钟的例子:
create_clock -name clk1 -period 10.000 –waveform { 2.000 8.000 } [get_ports sysclk]
这个例子表示,有一个clk1的约束,在这个约束中设定了时钟的周期为10ns, 占空比为2ns低电平,8ns高电平。 这个叫做clk1的约束是针对sysclk这个端口的。
如果是利用内部锁相环分频出来很多其他时钟的约束,可以不再另外施加其他约束,逻辑综合器和布线器都能根据锁相环的参数自动计算。 如果是利用内部的逻辑单元分频出来的信号,则必须利用get_registers指定分频的寄存器名。 例如上例:
create_clock -name clk1 -period 10.000 –waveform { 2.000 8.000 } [get_registers cnt_clk].
对于逻辑单元分频的时钟信号,也可以采用命令create_generated_clock会更加精确。举例如下:
create_generated_clk -name clk2 -source [getports sysclk] -div 4 [get_registers cnt_clk]
这个约束命令描述了 一个clk2的约束,约束的对象是由sysclk分频4次得到的时钟,这个时钟是由cnt_clk这个寄存器产生的。
在高速的系统中,对时钟的描述可能会要求的更多,更加细致。 例如,会要求对时钟的抖动和时钟的延迟进行描述。 在SDC的文件格式中,可以通过两个命令来描述:set_clock_uncertainty 和 set_clock_latency 来设定。
时钟的延迟相对来讲比较简单。延迟一般分为外部延迟和内部时钟线网的延迟。 通常在约束时只对外部延迟做约束,在set_clock_latency的命令后带 -source的参数就可以了。 例如:
set_clock_latency -source 2 [get_clocks {clk_in} ]
时钟的抖动要稍微复杂一些。因为这个值不但会影响到对Tsu的分析,也会影响到对Thold的分析。 因此,采用set_clock_uncertainty的参数要多一些。 如果要理解这个命令对系统时序分析的影响,就需要对altera的延时计算的概念需要做更多的说明。
对于set_clock_uncertainty的情况,就稍微复杂一些。 因为set_clock_uncertainty的值既影响建立时间的计算,也影响保持时间的计算,因此,需要在设定时分别指明:
set_clock_undertainty –setup 0.500 –from clkA –to clkA
set_clock_uncertainty –hold 0.300 –from clkA –to clkA
前面的内容里面提供了计算输入输出延迟的计算方法。输出延迟的命令是set_output_delay. 有几个参数要加:参考时钟,最大最小值,和端口的名称。如下面的例子中描述。
set_output_delay -clock CLK -max 1.200 [get_ports OUT]
set_output_delay -clock CLK -min 0.800 [get_ports OUT] 输入延迟的命令很类似:
set_input_delay -clock CLK -max 2.000 [get_ports IN]
set_input_delay -clock CLK -min 1.600 [get_ports IN]
对一些特殊的设计要求,例如不关心的数据传递路径和多拍的路径,还需要增加false path 和 Multicycle的设定。
这两个约束比较简单,容易设定,但是非常关键。 如果设定的不好,系统性能会大打折扣。
false path是指在时序分析中不考虑其延迟计算的路径。例如有些跨越时钟域的电路等。 设定的方法:
set_false_path -from [get_clocks clkA] -to [get_clocks clkB]
set_false_path -from regA -to regB
第一条命令是设定了从时钟域clkA到时钟域clkB的所有路径都为false path. 第二条命令设定了从 regA到regB的路径为false path. 这两种路径在做时序分析时都会被忽略。
multicycle的设定和false path的设定方法差不多。
为了让逻辑综合器和布局布线器能够根据时序的约束条件找到真正需要优化的路径,我们还需要对时序报告进行分析,结合逻辑综合器的时序报告,布线器的时序报告,通过分析,可以看出是否芯片的潜能已经被完全挖掘出来。 关于如何看时序分析报告,如果有机会,也可以专门搞个讲座进行详细的讲解。 以上是在某个论坛上转过来的,只是感觉对约束中路径的解释比较好一点,至于后面的关于SDC我自己也没有接触过了,暂时看看。 |  /1
/1 

 eetop公众号
eetop公众号 创芯大讲堂
创芯大讲堂 创芯人才网
创芯人才网
 IP卡
IP卡 狗仔卡
狗仔卡 发表于 2013-5-18 10:03:13
发表于 2013-5-18 10:03:13
 提升卡
提升卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡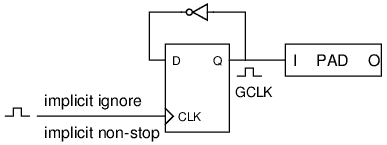
 7J
7J
 创芯人才网
创芯人才网